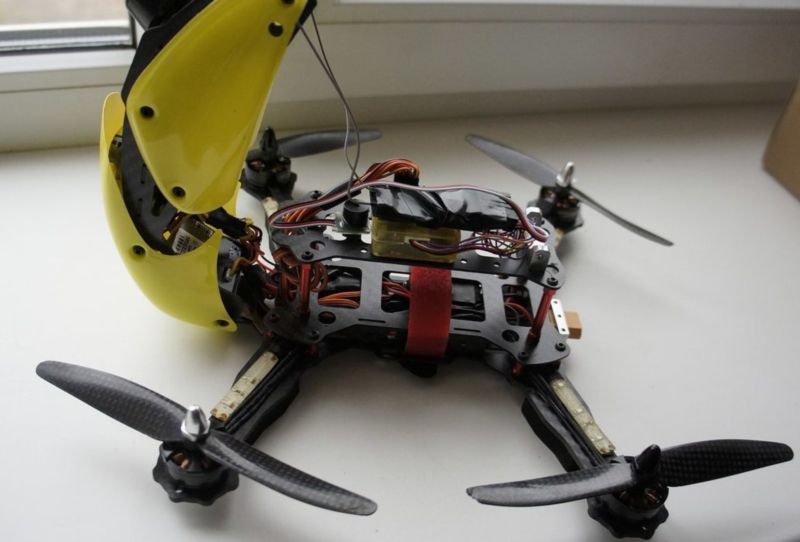
Гоночный квадрокоптер
Квадрокоптер – это многомоторный вертолет, оснащенный несколькими несущими винтами, вращающимися по диагонали в режиме постоянного шага, 2 из которых вращаются против, 2 по ходу движения часовой стрелки.
Содержание:
Устройство

Алгоритм управления мультикоптером основан на изменении скорости вращения работы винтов:
- повышенный режим работы 4-х винтов – взлет и набор высоты;
- ускорение работы двух боковых винтов с одной стороны и замедление с противоположной – перемещение в сторону;
- замедление вращения винтов, работающих против часовой стрелки и ускорение по часовой – движение с разворотом.
Для приема и передачи команд управления работой двигателей и оборудования, аппарат оснащен микропроцессором.
Для стабилизации во время полета и в режиме зависания оснащается тремя гироскопами, которые стабилизируют движение в горизонтальном положении. Дополнительно устанавливается акселерометр, передающий данные процессору для горизонтальной стабилизации, и бортовой датчик высоты полета.
Некоторые модели комплектуются сонаром, предназначенным для автоматического приземления, поддержания режима полета на низкой высоте и смены направления движения для предотвращения столкновения с препятствиями.
Для правильной ориентации на местности устанавливается GPS-приемник с заранее записанным маршрутом, что позволяет вернуться в пункт старта при потере сигнала между оператором и мультикоптером.
Как выбрать гоночный квадрокоптер

Скоростные модели оснащаются бесколлекторными электродвигателями, работающими от источника питания литий-полимерных аккумуляторов. Основное количество аппаратов имеет массу 1-4 кг, а время нахождения в состоянии полета 10-30 мин.
Подробнее о квадрокоптерах с камерой читайте в этой статье.
Дальность полета ограничивается расстоянием прямой видимости и составляет при работе в режиме управления оператором 100 – 200 м. Разнообразие моделей позволяет выбрать квадрокоптер с нужными характеристиками в предлагаемом на рынке ценовом диапазоне.
Выпускаемые мультикоптеры имеют различные характеристики за счет мощности и материала обшивки.
На аппараты устанавливаются электродвигатели:
- Коллекторные – которые применяются для комплектования мини моделей. Имеют малый вес, низкую стоимостью. К недостаткам можно отнести – недостаточную тягу и быстрое повышение температуры во время работы двигателя.
- Коллекторные с редуктором – устанавливаются на мультикоптеры классом выше, но не дорогие модели. Положительные характеристики – умеренная стоимость и вес, хорошая тяга. Недостатки – перегрев во время работы, повышенный износ шестерен.
- Бесколлекторные – применяются на дорогих моделях, имеют отличные тяговые показатели и высокий КПД, долговечны в эксплуатации. Недостатки – большой вес и стоимость.
Лучшими показателями при эксплуатации обладают бесколлекторные электродвигатели, обеспечивающие скорость и дальность полета.
Особое внимание уделяется винтомоторной группе, которая способна достичь необходимой величины тяги двигателей в граммах, что дает возможность рассчитать взлетный вес и массу полезного оборудования.
Винты стандартного и обратного вращения изготавливаются из карбона, который обеспечивает достаточную прочность и длительный срок эксплуатации.
Для управления мулитикоптером тщательно подбирается контролер, выполняющий функции по управлению работой блоков с возможностью подсоединения GPS-приемника.
При создании и конструировании мультикоптеров особое внимание уделяется материалу, из которого изготавливают корпус.
При выборе материала, учитывается ряд факторов:
- в аппаратах укомплектованных редуктором при падении с высоты полета, редуктор ломается и требует замены;
- винты небольшого размера при падении подвержены меньшим повреждениям;
- аппарат, обладающий малыми габаритами и весом, лучше сохраняются при падении.
Для изготовления корпуса мультикоптера используются материалы:
- Пенопласт прессованный (EPO) – малый вес, ремонтопригодность, но слабая прочность.
- Пластик – малый вес, удовлетворительная прочность.
- Карбон – малый вес, достаточно прочен, высокая цена.
- Алюминий – прочен, большой вес.
Широкое распространение получила модульная компоновка мультикоптеров, которая позволяет в случае выхода из строя детали, производить её замену на аналогичную, используя обычный инструмент.
Виды и характеристики гоночных квадрокоптеров
Некоторые модели квадрокоптеров способны развивать скорость до 110 км/час – используются как гоночные модели. Но основное количество аппаратов обеспечивает скоростной режим передвижения в диапазоне 20-70 км/час.
Для совершенствования управления аппаратом желательно, чтобы все модели оснащались датчиком зарядки аккумуляторной батареи. Все выпускаемые коптеры обладают дальностью полета не менее 20 м.
Для стабилизации аппаратов в воздухе применяются 2 системы:
- Шестиосевая – обеспечивает горизонтальную ориентацию аппарата.
- Трехосевая – имеет невысокую стоимость, но после потери ориентации стабилизация нарушается и модель падает.
При потере сигнала между квадрокоптером и оператором в зависимости от комплектации оборудованием, оснащения системой управления и контроля возможны несколько вариантов реагирования аппарата:
- Продолжает движение по траектории и направлению полученных данных при последнем сеансе связи. В данной ситуации модель способна улететь от оператора при достаточном ресурсе энергоснабжения.
- Падает на землю.
- Модель на основании введенного ранее маршрута возвращается в точку старта.
Для стабилизации работы контролера применяется антивибрационная подставка позволяющая сократить негативное воздействие на электронные компоненты управления квадрокоптера.
FPV (First Person View) – это система управления мулькоптером с помощью видеокамеры, когда принимается видеосигнал и отображается на мониторе или специальных FPV-очках оператора.
Управление с помощью FPV позволяет:
- повысить уровень управления аппаратом;
- увеличить дальность полетов;
- получать оперативную информацию передаваемую видеокамерой.
Используемые FPV состоят из блоков:
- видеоприемника (VRX);
- видеопередатчика (VTX);
- дисплея;
- передающей видеокамеры.
Камера, транслирует сигнал с помощью приемо-передающей аппаратной части. Он проецируется на монитор или FPV-очки. Система может быть дополнительно укомплектована GPS-приемником и датчиками. Камеры обладают разрешением при использовании стандарта SECAM в диапазоне 600-1200 TVL, а PAL/NTSC –до 700 TVL и оснащаются матрицами CCD и CMOS.
Причем CCD обладает большей чувствительностью, шириной диапазона и устойчивостью к помехам. При передаче сигнала аналоговые видеокамеры обеспечивают более низкую задержку при сопоставлении с HD камерами.
Для передачи видеосигнала используются приемники и передатчики, работающие в диапазоне частот:
- 900 МГц;
- 1200 МГц;
- 1300 МГц;
- 2400 МГц;
- 5800 МГц.
Наиболее часто применяемые – 2.4 и 5.8 ГГц.
Видеопередатчики, устанавливаемые на мультикоптеры, имеют мощность 25 – 1000 mW.
Для передачи сигнала используются антенны:
- всенаправленная штыревая;
- клеверная с круговой поляризацией и малым усилением;
- спиральная направленная, обладающая большим радиусом действия;
Комплектуются разъемами RP-SMA и SMA. Для видеоконтроля и управления полетом коптера используются мониторы и FPV-очки.
К мониторам предъявляются требования:
- возможность регулировки яркости и подсветки;
- размер экрана не менее 7 дм;
- для подсоединения кабеля необходим разъем AV входа;
- монитор должен быть рассчитан на работу от аккумуляторных батарей 3S или 2 S.
При отображении видеосигнала может быть задействована OSD-опция, которая позволяет выводить на экран монитора данные:
- GPS координаты;
- заряд батареи;
- высоту полета;
- скорость.
Блоки FPV рассчитаны на работу от источника питания напряжением 12 В. Для подавления помех возникающих от работы монитора используется фильтр LS.
Для облегчения поиска упавшей модели устанавливается звуковая сигнализация, срабатывающая при подаче поискового импульса с пульта. Для полетов в вечернее и ночное время мультикоптеры оснащаются световой сигнализацией, позволяющей отслеживать маршрут и местонахождение аппарата.
Эксплуатация

Квадрокоптер, оснащенный четырьмя электродвигателями, при возникновении неисправности не может совершить плавную посадку, поэтому необходимо соблюдать ряд правил:
- Запрет на полеты над скоплением людей.
- Запрет полетов над автотрассами.
- При планировании маршрута полета квадрокоптера должны быть предусмотрены участки для посадки.
- При настройке контролера должны соблюдаться рекомендуемые параметры регулировки блоков аппарата.
Для обучения управлению выбирайте квадрокоптер для начинающих.
Эксплуатация подобных мультикоптеров безопасна и помогает освоить алгоритм управления, связанный с операциями:
- взлета и посадки;
- зависания на одном месте;
- набора высоты;
- огибания препятствий на маршруте движения аппарата;
- принятия правильных решений в экстренных ситуациях.
Среди владельцев коптеров проводятся соревнования, в следующих категориях:
- Гонки по кругу – проводятся по маршруту между двумя участниками с прохождением ворот. При падении мультикоптера участник дисквалифицируется, а при пропуске ворот необходимо вернуться и пролететь через створ заново.
- Гонки на время – организуются по маршруту на лучший результат прохождения трассы.
- Фристайл – соревнования на лучшее выполнение фигур высшего пилотажа. Победитель определяется по решению судейской комиссии.
Эксплуатация квадрокоптеров популяризирует авиамодельный спорт и расширяет возможности использования аппаратов в народном хозяйстве и частном предпринимательстве.